 E-submission
E-submission TOTA
TOTA TOTS
TOTS
Search
- Page Path
- HOME > Search
Review Article
- Innovative applications of artificial intelligence in orthopedics focusing on fracture and trauma treatment: a narrative review
- Chul-Ho Kim, Ji Wan Kim
- J Musculoskelet Trauma 2025;38(4):178-185. Published online October 24, 2025
- DOI: https://doi.org/10.12671/jmt.2025.00283
-
 Abstract
Abstract
 PDF
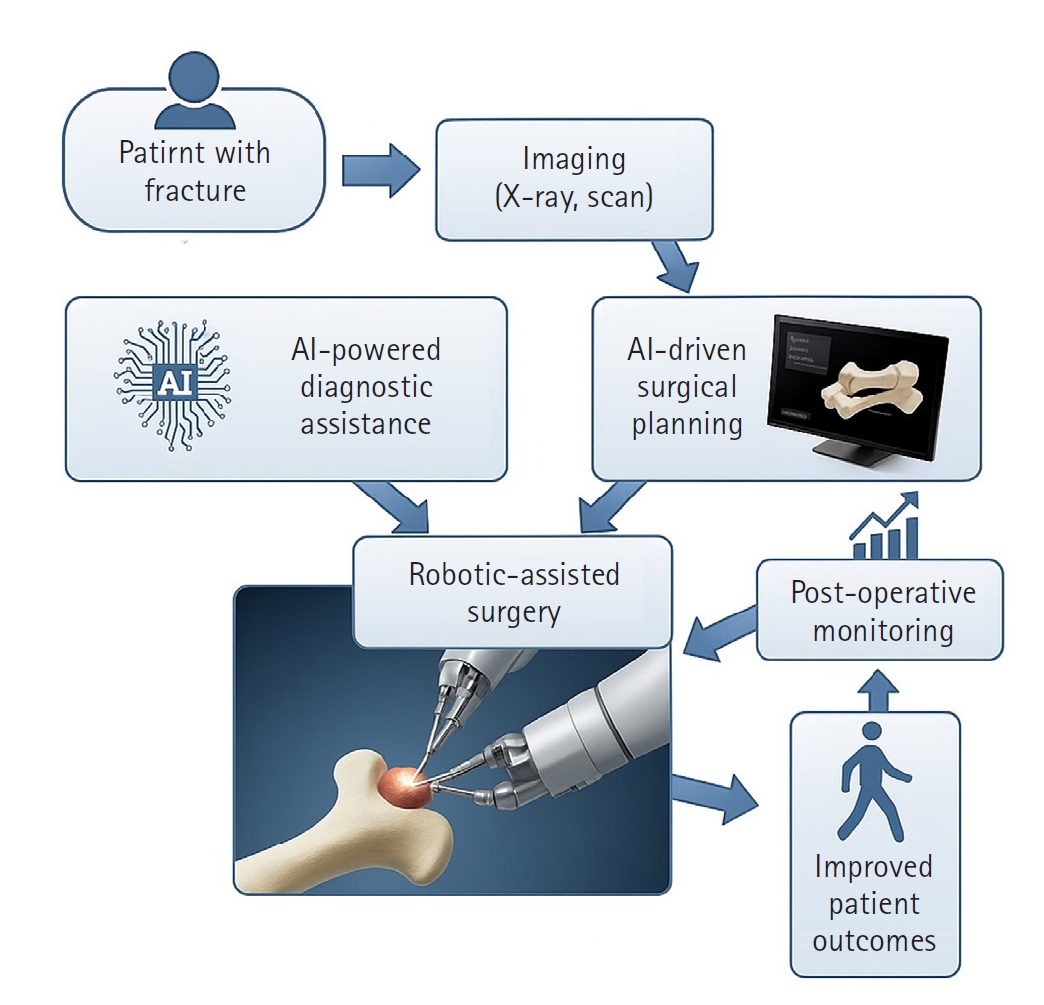
PDF - Artificial intelligence (AI) is bringing about transformative changes in orthopedic surgery, with its potential being particularly prominent in the field of fracture and trauma treatment. This review explores the current applications and future prospects of AI-driven surgical planning and simulation, robot and image-based navigation surgery, and image-assisted diagnostic technologies. Robotic assistance in orthopedic surgery, which was initially applied to improve accuracy in component implantation for knee and hip arthroplasty and to achieve high precision in spinal screw placement, has recently expanded its use to include accurate, minimally invasive reduction of pelvic fractures. In diagnostics, AI aids in the early prediction and classification of ambiguous fractures in various anatomical regions—for example, detecting shoulder or hip fractures, identifying incomplete atypical femur fractures, and classifying femoral neck fractures—through X-ray image analysis. This improves diagnostic accuracy and reduces medical costs. However, significant challenges remain, including high initial costs, steep learning curves, a lack of long-term studies, data bias, and ethical concerns. Continued research, interdisciplinary collaboration, and policy support are crucial for the widespread adoption of these technologies.
-
Citations
Citations to this article as recorded by
- AI-Assisted Fracture Detection in Orthopedic and Trauma Imaging: Where It Works, Where It Fails, and Principles for Safe Clinical Deployment
Wojciech Michał Glinkowski, Paweł Kaminski, Rafał Obuchowicz
Diagnostics.2026; 16(10): 1420. CrossRef
- AI-Assisted Fracture Detection in Orthopedic and Trauma Imaging: Where It Works, Where It Fails, and Principles for Safe Clinical Deployment
- 1,449 View
- 36 Download
- 1 Crossref

Original Article
- Development of a Computer-assisted Surgery System for Screw Fixation of the Sacro-iliac Joint
- Jin Sup Yeom, Won Sik Choy, Ha Yong Kim, Whoan Jeang Kim, Jong Won Kang, Yeongho Kim, Hyungmin Kim, Donghyun Seo, Seok Lee, Jae Bum Lee, Namkug Kim, Cheol Young Kim
- J Korean Soc Fract 2003;16(1):1-7. Published online January 31, 2003
- DOI: https://doi.org/10.12671/jksf.2003.16.1.1
-
Abstract
PDF
- PURPOSE
The purposes of this study were to develop a computer-assisted surgery system for percutaneous screw fixation of the sacro-iliac joint and to evaluate its accuracy.
MATERIALS AND METHODS
We have developed a navigation system composed of an optical tracking device (Polaris, Northern Digital, Canada) and a personal computer. The registration error and target localization error at hybrid registration were measured using a phantom. The errors were measured 30 times for each. Sixteen 6.5 mm cannulated screws were inserted into four plastic bone models (Sawbones, USA), and the accuracy was evaluated.
RESULTS
The registration error was 0.76 +/-0.33 mm, and the target localization error was 1.43 +/-0.42 mm. All of the 16 screws were inserted well across the sacro-iliac joint, and there was neither penetration of the cortical bones nor collision between screws or washers.
CONCLUSION
The accuracy of the developed system was similar to existing ones, and its usefulness and helpfulness was proven with screw insertion into plastic bone models.
- 774 View
- 3 Download
 First
First Prev
Prev

